.jpg) 上 海 明 疆 工 貿(mào) 有 限 公 司
上 海 明 疆 工 貿(mào) 有 限 公 司 
日本MINEBEA(美蓓亞)電機
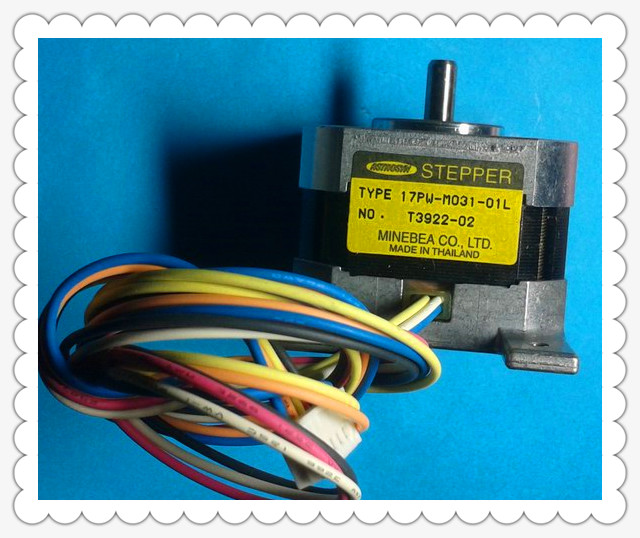
特價供應(yīng)日本MINEBEA(美蓓亞) 42 微型步進電機,型號:17PW-M031-01L,安裝尺寸:42 mm。電壓12-24V,線型:4相6線,步距角:1.875°。 現(xiàn)貨數(shù)量:2000臺。
電機尺寸:

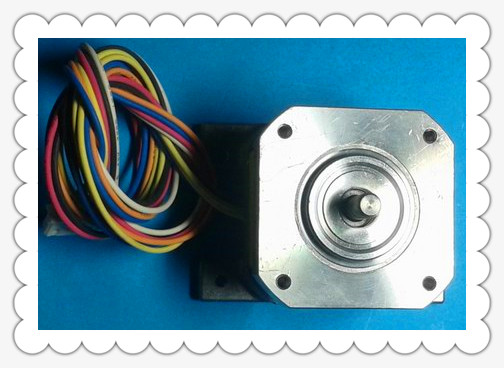
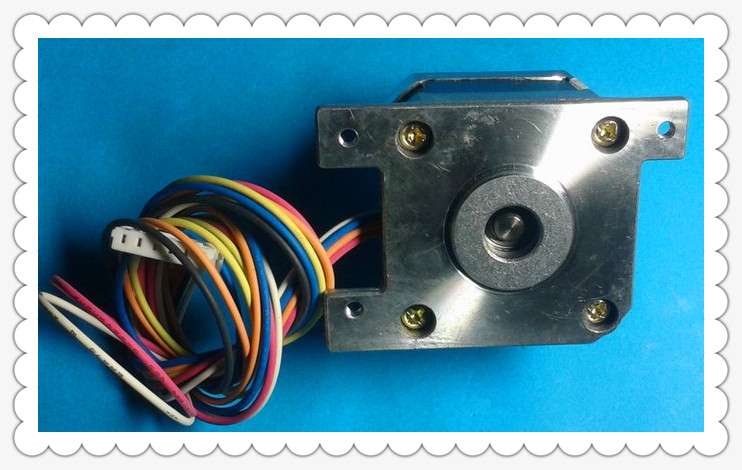
高清實物圖

電機接線說明
黑色和白色為中心抽頭;粉色、黃色、黑色為一組;藍色、棕色、白色為一組。
電機具體接線確認方法
六根線一般是兩組的,先用萬用表表筆接其中一個線,然后依次點其他的線,凡是不通的都是另外一個組的,剩下的兩個是跟你接的這個是一組的,一組里面的三個線,其中一個是中心抽頭,用表筆反復(fù)測試三根線,兩者之間電阻最大的是線圈的兩頭抽頭,剩下的就是中心抽頭的。這樣就可以測出所有的線的定義了!結(jié)合這個電機,我測了一下,黑白兩根線是中間抽頭,其余的為電機的四相。還有一個問題就是如何確定驅(qū)動正轉(zhuǎn)和反轉(zhuǎn)的順序問題。一般步進電機的標稱值是沒有電壓這一個參數(shù)的,但也有很多的步進電機上面標了,如果是標了電壓值,那么這個標稱值就是最低驅(qū)動電壓,比如說標稱值為5V,那么一般就要5V以上的驅(qū)動電壓才能帶動負載。所以你要根據(jù)你的步進電機的標稱來測試你的電機,我是用24V來進行測試的。
方法如下:1、先把兩個線圈的中心抽頭連接起來并接24V電源的正極(也可以是負極);
2、用電源負極去碰另外的4個線頭,碰一次,先看電機是正轉(zhuǎn)還是反轉(zhuǎn),如果是正轉(zhuǎn),那么再碰下一個,看是反的還是正的,反的就說明這個線不是你目前需要的,正的話,就是了,然后再重新來一次剛才的過程,確認一下。如此這般,就可以確定步進電機的驅(qū)動順序了。這里還要介紹一個小細節(jié),就是需要在電機軸上貼個小標簽,以方便觀察電機是否有轉(zhuǎn)動,我剛開始沒有貼標簽,以為電機沒有轉(zhuǎn)動呢,比較泄氣,后來想想不對勁,仿佛聽到了電機內(nèi)部有轉(zhuǎn)動的響聲啊,后來我就想是不是因為轉(zhuǎn)動角度比較小,肉眼不容易察覺到,所以我就貼了一個指示標簽在上面,這次果然發(fā)現(xiàn)碰線的時候,電機有轉(zhuǎn)動的角度啦!
步進電機原理
步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進電機件。在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負載變化的影響,當(dāng)步進驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進電機按設(shè)定的方向轉(zhuǎn)動一個固定的角度,稱為“步距角”,它的旋轉(zhuǎn)是以固定的角度一步一步運行的。可以通過控制脈沖個數(shù)來控制角位移量,從而達到準確定位的目的;同時可以通過控制脈沖頻率來控制電機轉(zhuǎn)動的速度和加速度,從而達到調(diào)速的目的。
步進電機內(nèi)部結(jié)構(gòu):
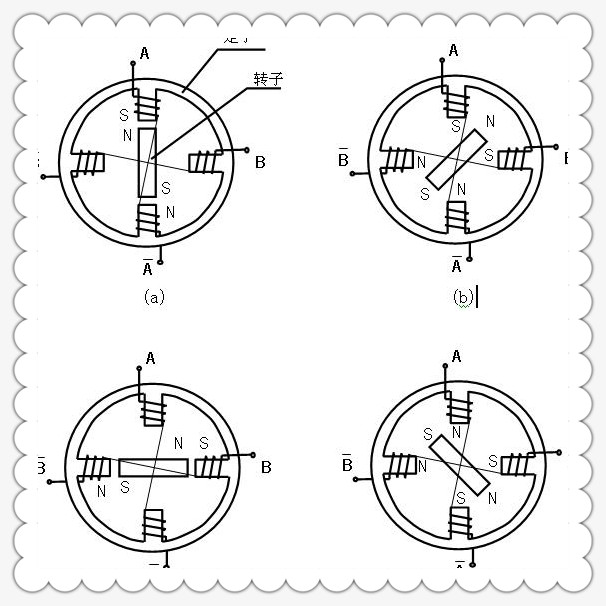
通過上圖可知,A,~A是聯(lián)通的,B和~B是聯(lián)通。那么,A和~A是一組a,B和~B是一組b。 不管是兩相四相,四相五線,四相六線步進電機。內(nèi)部構(gòu)造都是如此。至于究竟是四線,五線,還是六線。就要看A和~A之間,B和B~之間有沒有公共端com抽線。如果a組和b組各自有一個com端,則該步進電機六線,如果a和b組的公共端連在一起,則是5線的。
步進電機的接線:
如何區(qū)分組別,確認步進電機接線:應(yīng)該用萬用表打表。四線:由于四線沒有com公共抽線,所以,a和b組是絕對絕緣的,不連通的。所以,用萬用表測,不連通的是一組。五線:由于五線中,a和b組的公共端是連接在一起的。用萬用表測,當(dāng)發(fā)現(xiàn)有一根線和其他幾根線的電阻是相當(dāng)?shù)模敲矗@根線就是公共com端。對于驅(qū)動五線步進電機,公共com端不連接也是可以驅(qū)動步進電機的。六線:a和b組的公共抽線com端是不連通的。同樣,用萬用表測電阻,發(fā)現(xiàn)其中一根線和其他兩根線阻止是一樣的,那么這根線是com端,另2根線就屬于一組。對于驅(qū)動四相六線步進電機,兩根公共com端不接先也可以驅(qū)動該步進電機的。
步進電機的分類:
步進電機在構(gòu)造上有三種主要類型:
反應(yīng)式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
反應(yīng)式:定子上有繞組、轉(zhuǎn)子由軟磁材料組成。結(jié)構(gòu)簡單、成本低、步距角小,可達1.2°、但動態(tài)性能差、效率低、發(fā)熱大,可靠性難保證。
永磁式:永磁式步進電機的轉(zhuǎn)子用永磁材料制成,轉(zhuǎn)子的極數(shù)與定子的極數(shù)相同。其特點是動態(tài)性能好、輸出力矩大,但這種電機精度差,步矩角大(一般為7.5°或15°)。
混合式:混合式步進電機綜合了反應(yīng)式和永磁式的優(yōu)點,其定子上有多相繞組、轉(zhuǎn)子上采用永磁材料,轉(zhuǎn)子和定子上均有多個小齒以提高步矩精度。其特點是輸出力矩大、動態(tài)性能好,步距角小,但結(jié)構(gòu)復(fù)雜、成本相對較高。
按定子上繞組來分,共有二相、三相和五相等系列。最受歡迎的是兩相混合式步進電機,約占97%以上的市場份額,其原因是性價比高,配上細分驅(qū)動器后效果良好。該種電機的基本步距角為1.8°/步,配上半步驅(qū)動器后,步距角減少為0.9°,配上細分驅(qū)動器后其步距角可細分達256倍(0.007°/微步)。由于摩擦力和制造精度等原因,實際控制精度略低。同一步進電機可配不同細分的驅(qū)動器以改變精度和效果。
